In multirotor drones, flight is not just about motors or propellers—it’s about a tightly coupled energy chain where every component affects the next. Understanding how electrical energy is converted into thrust is the foundation of selecting the right battery, optimizing performance, and avoiding costly mismatches.
Let’s break down the complete powertrain, then walk through hover power calculation, and finally translate that into practical battery selection.
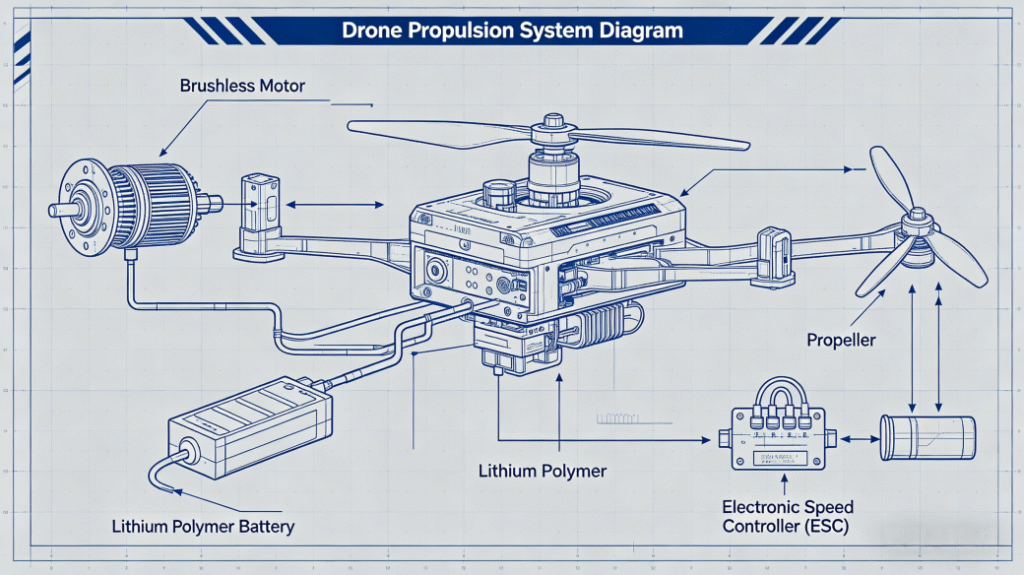
⚙️ 1. The Complete Drone Power Chain
At its core, a multirotor drone follows a simple but highly interdependent energy flow:
Battery → ESC → Motor → Propeller → Airflow → Thrust → Flight
Each stage transforms energy from one form to another:
- Electrical energy (battery)
- Controlled electrical signals (ESC)
- Mechanical rotation (motor)
- Aerodynamic force (propeller)
- Lift (thrust overcoming gravity)
📌 Key insight: No component works independently. A mismatch anywhere—battery, ESC, motor, or prop—will limit the entire system.
🔍 2. Component-by-Component Breakdown
🔋 Battery: The Energy Source
The battery defines the upper limit of the entire system.
Key parameters:
- Voltage (S count): Determines maximum motor speed and thrust ceiling → Higher voltage = higher RPM = more thrust (ideal for heavy-lift & windy conditions)
- Capacity (Ah): Determines flight time → Larger capacity = longer flight, but heavier weight
- Discharge rate (C rating): Determines burst power capability → Insufficient C = voltage sag, power drop, crash risk
👉 Simple rule: Voltage = speed ceiling Capacity = flight time C rating = burst power
⚡ ESC (Electronic Speed Controller): The Power Regulator
The ESC is the bridge between battery and motor.
Core functions:
- Converts DC → 3-phase AC
- Adjusts motor speed based on flight controller signals
- Provides protection (overcurrent, voltage stability)
Critical constraint:
- ESC current rating (A) must exceed motor demand by 20–30% margin
👉 Think of ESC as the “power distributor” that ensures smooth and safe energy delivery.
🌀 Motor: The Power Converter
The motor converts electrical energy into mechanical rotation.
Key parameters:
- KV rating: RPM per volt Low KV + large prop → efficient, long endurance High KV + small prop → aggressive, high power
- Size & construction: Determines torque and load capability
- Rated power: Must match battery output capability
👉 Higher efficiency = more flight time from the same battery.
🪶 Propeller: The Thrust Generator
The propeller converts rotation into lift.
Key factors:
- Diameter: Larger = more efficient lift, lower RPM Smaller = faster response, higher energy consumption
- Pitch: Higher pitch = more thrust but higher load
- Material & design: Affects efficiency, vibration, and noise
👉 A mismatched prop can waste energy—even with a perfect motor and battery.
🌬️ Final Output: Thrust
- Hover: Thrust = Weight
- Climb: Thrust > Weight
- Maneuvering: Dynamic thrust variation
Everything ultimately translates into stable and controllable thrust.
📐 3. Hover Power Calculation (The Key to Battery Selection)
Hover is the most stable and energy-efficient state, making it the baseline for system design.
📊 Core Formula:

Where:
- m = total weight (kg)
- g = 9.81 m/s²
- TWR = thrust-to-weight ratio (1.5–2.0 typical)
- η = system efficiency (0.7–0.85)
- K = safety factor (1.15–1.25)
📌 Example (5kg Drone):
- Weight: 5 kg
- TWR: 2.0
- Efficiency: 0.8
- Safety factor: 1.2
Phover≈303.6WP_{hover} ≈ 303.6WPhover≈303.6W
🔋 4. Translating Power into Battery Selection
Once you know hover power, battery sizing becomes straightforward:
1️⃣ Current Calculation

Example (6S = 22.2V): → 303.6 ÷ 22.2 ≈ 13.7A
2️⃣ Capacity Calculation

(0.8 = usable capacity factor)
3️⃣ C Rating Calculation

- Peak current ≈ Hover current × 2.5
👉 Ensures the battery can handle bursts (wind, acceleration)
✈️ 5. Power Demand Across Flight Conditions
Different flight modes dramatically change power demand:
- Hover (baseline): lowest consumption
- Takeoff / climb: 1.3–1.5× hover power
- Cruise: 1.2–1.4× hover power
- Aggressive maneuvering / wind resistance: up to 2.5–3× hover power
📌 This is why battery C rating and thermal performance matter as much as capacity.
🎯 6. Practical System Matching Strategies
📷 Long-Endurance Aerial Photography
- High energy density battery
- Low KV motor
- Large propeller
- Focus: efficiency & flight time
🏗️ Industrial Inspection / Wind Resistance
- Balanced battery (energy + power)
- Medium KV motor
- Safety margin in ESC & battery
🏁 FPV Racing / High Dynamics
- High C-rate battery
- High KV motor
- High-performance ESC
- Focus: burst power
🔑 Final Takeaway
A drone’s performance is not defined by a single component—it is the result of system-level optimization:
- Battery provides energy
- ESC controls delivery
- Motor converts power
- Propeller creates thrust
And the key to getting it right?
👉 Start from hover power, and design everything around it.
💬 Closing Thought
In drone engineering, the biggest mistake is optimizing components individually. The real advantage comes from matching the entire power chain as one system.
Because in the air, efficiency is not optional—it’s everything.
Are you choosing the right battery solution for your drone? The ideal battery setup can vary greatly depending on your drone model, payload, and operating environment. Follow us DM us for one-on-one battery solution consulting tailored to your needs.